

Virtuelle Inbetriebnahme erlaubt Simulation und Optimierung von Maschinen, Anlagen und Robotern bereits vor physischer Installation. Mit RoboDK lassen sich Abläufe und Steuerungslogiken ohne reale Hardware offline programmieren, testbar über eine kostenlose Webversion. Dieser Ansatz reduziert Stillstände und Projektlaufzeiten, da mögliche Kollisionen und Fehlerquellen frühzeitig erkannt werden. Unternehmen senken so Kosten durch verkürzte Inbetriebnahmen. Die Software, entwickelt im CoRo-Labor der ETS Universite de Montreal, wird von über 50.000 Anwendern weltweit eingesetzt.
Inhaltsverzeichnis: Das erwartet Sie in diesem Artikel
Virtuelle Inbetriebnahme: Digitale Simulation und Test vor physischer Installation
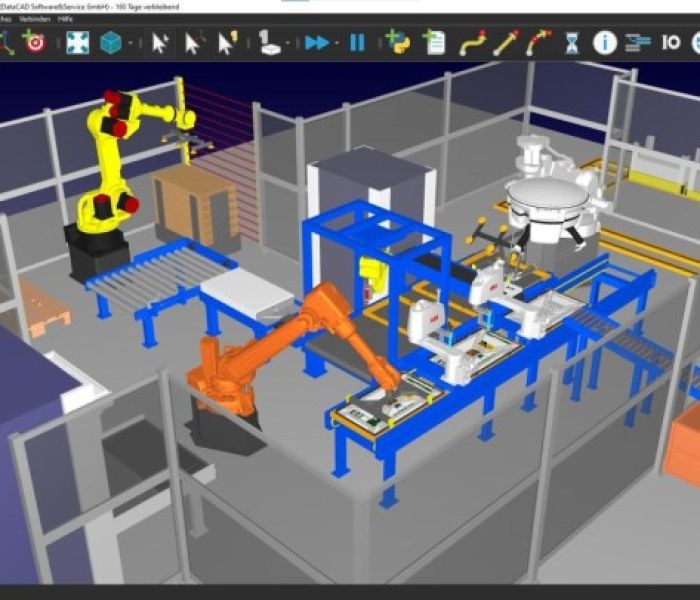
Effizient sparen mit RoboDK in der virtuellen Inbetriebnahme (Foto: DataCAD Software und Service GmbH)
Die virtuelle Inbetriebnahme umfasst die Simulation kompletter Produktionssysteme in einer digitalen Umgebung, in der Steuerungslogik, Abläufe und Bewegungen realitätsnah getestet werden. Durch die frühe Validierung von Programmabläufen können potenzielle Kollisionen, Synchronisationsprobleme und Fehlfunktionen bereits vor dem Einbau physischer Komponenten erkannt und behoben werden. Dieser methodische Ansatz reduziert Kosten durch vermiedene Nacharbeiten, senkt Projektlaufzeiten und minimiert Risiken während des Onsite-Starts, indem er eine zuverlässige und stabile Systemkonfiguration garantiert, effizient und nachvollziehbar.
Virtuelle Inbetriebnahme beschleunigt Projekte, reduziert Kosten und steigert Effizienz
In einer Zeit, in der Personalaufwendungen kontinuierlich ansteigen, Anlagen immer komplexer werden und höchste Qualitätsmaßstäbe gelten, rückt eine effiziente und kostensparende Prozessgestaltung in den Fokus. Virtuelle Inbetriebnahme ermöglicht bereits in den Planungsphasen eine umfassende digitale Prüfung von Abläufen und Steuerungsparametern. Aufwände lassen sich so frühzeitig minimieren, Projektdurchläufe beschleunigen und die Abstimmung zwischen Konzept und Realisierung deutlicher entkoppeln, wodurch verzögerungsbedingte Risiken deutlich sinken und verbessert gleichzeitig die Wirtschaftlichkeit von Investitionsvorhaben signifikant.
RoboDK ermöglicht virtuelle Robotersimulation und Offline-Programmierung für komplexe Abläufe
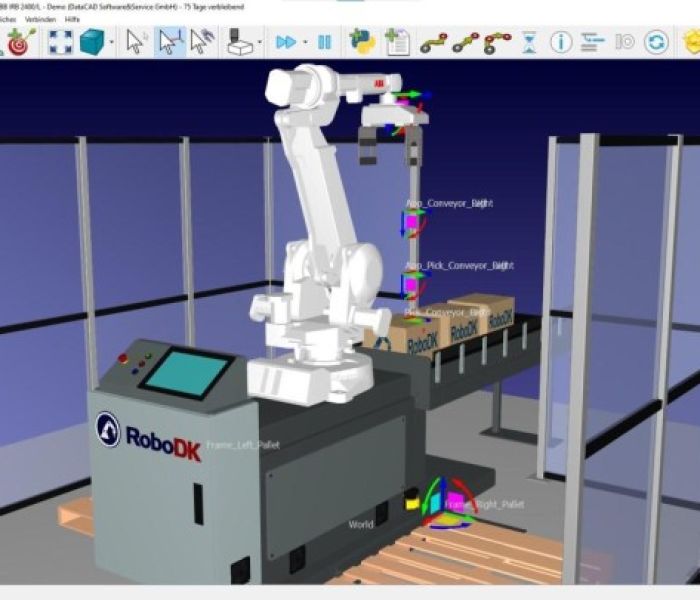
Effizient sparen mit RoboDK in der virtuellen Inbetriebnahme (Foto: DataCAD Software und Service GmbH)
RoboDK bietet eine umfassende Plattform zur Offline-Programmierung und Simulation unterschiedlicher Robotermodelle in einer vollständig virtuellen Umgebung. Anwender können Bewegungsabläufe planen, Greifer wechseln und komplexe Kinematiken realitätsnah simulieren. Dank Unterstützung für über 1.200 Roboterarme von mehr als 80 Herstellern lassen sich optimierte Steuerungsprogramme direkt in die reale Maschine übertragen. Änderungen lassen sich ohne Produktionsunterbrechung testen, wodurch Stillstandszeiten minimiert und Implementierungsrisiken deutlich reduziert werden. Diese Effizienzsteigerung ermöglicht schnelle Projektzyklen und Kostenersparnisse erheblich.
RoboDK testet Roboterprogramme vorab und reduziert Stillstandszeiten signifikant deutlich
Mittels RoboDK lassen sich Stillstandszeiten in der Fertigung deutlich verringern, da Roboterprogramme bereits vor der Inbetriebnahme offline geprüft werden – ohne Bindung an den realen Produktionsprozess. Durch die Simulation werden potenzielle Kollisionen, Engpässe oder ineffiziente Bewegungsbahnen frühzeitig identifiziert. Daraus resultieren geringerer Nacharbeitsaufwand, schnellere Projektabschlüsse und eine gesteigerte Verfügbarkeit der Anlagen. Insgesamt führt dies zu effizienteren Abläufen, planbaren Inbetriebnahmezeiten und reduzierten Kosten im Produktionsumfeld. Die durchgängige Offline-Validierung ermöglicht zudem eine präzisere Ressourcenplanung und minimiert Ausfallrisiken während der Anlaufphase.
Virtuelle Validierung mit RoboDK reduziert Inbetriebnahmezeiten und Nacharbeiten nachhaltig
Zahlreiche Unternehmen konnten durch den Einsatz von RoboDK ihre Inbetriebnahmezeiten erheblich verkürzen und Nacharbeiten drastisch verringern. Vor allem bei hochkomplexen Anlagen und dem Zusammenspiel mehrerer Roboter profitieren Anwender von virtuellen Validierungen: Die Simulationen decken mögliche Kollisionen, Engpässe und ineffiziente Bewegungsabläufe frühzeitig auf, sodass Anpassungen bereits im digitalen Zwilling vorgenommen werden. Die verkürzten Projektlaufzeiten und reduzierten Kosten bewirken eine rasche Amortisation der Investitionsausgaben schon in den ersten Projektabschnitten. Innovationsprozesse fördern zusätzlich.
RoboDK Webversion kostenlos: Browserbasierte Simulation ohne Installation und Aufwand
Die kostenlose Webversion von RoboDK ermöglicht Anwendern, ohne Installation direkt im Browser Proof-of-Concept-Simulationen und einfache Roboterprogramme zu erstellen. Innerhalb weniger Klicks konfigurieren Nutzer Arbeitsabläufe, testen Kollisionen und visualisieren Bewegungsabläufe. Dank der webbasierten Bedienoberfläche ist kein lokaler Rechneraufwand erforderlich. Neueinsteiger profitieren durch ein intuitives Design, das komplexe Funktionen übersichtlich darstellt und die Einstiegshürde senkt. Gleichzeitig bleibt die volle Kompatibilität mit der Desktopversion für weiterführende Projekte erhalten und bietet sofortige Ergebnisse in Echtzeit.
RoboDK-Webversion importiert STEP, IGES, G-Code, APT und weitere Formate
Die browserbasierte Version ermöglicht den Import und die Verarbeitung zahlreicher 3D-Modell- und Bearbeitungsschnittstellen wie STEP, IGES, G-Code und APT sowie diverser weiterer Formate. Nutzer profitieren von der durchgängigen Kompatibilität zwischen Webanwendung und Desktop-Applikation, indem sie ihre fertigen Projekte unkompliziert in RoboDK Professional importieren. Dort stehen erweiterte Simulationsfunktionen, präzisere Kollisionsprüfungen, optimierte Bewegungsabläufe und tiefgreifende Analysewerkzeuge bereit, um Arbeitsabläufe zu verfeinern und die Effizienz im Offline-Programmierungsprozess zu steigern sowie umfassende, automatisierte Projektvalidierung.
RoboDK-Lizenz ermöglicht beliebige Offline-Programmierung unbegrenzt vieler Roboter weltweit effizient
Mit einer einzigen RoboDK-Lizenz lassen sich beliebig viele Roboter unabhängig von Hersteller oder Modell offline programmieren, simulieren und optimieren. Mehr als 50.000 Anwender in über 50 Ländern setzen auf diese ausgereifte Technologie. Die unbefristete Lizenz kostet ab 3.995 ? und umfasst eine umfassende Online-Dokumentation, praxisnahe Trainingsunterlagen sowie ein strukturiertes Einstiegskonzept in fünf Schritten. Kompatibel ist die Software mit Windows, macOS, Ubuntu, Raspberry Pi sowie Android- und iOS-Geräten, weltweit ohne zusätzliche Kosten.
RoboDK wurde 2015 gegründet, Spin-off aus CoRo-Labor Montreal gestartet
Im Januar 2015 gründete Albert Nubiola RoboDK als Spin-off aus dem CoRo-Labor der ETS University in Montreal, Kanada. Ziel war, eine flexible Robotik-Programmiersoftware zu entwickeln. Zu Beginn bot die Bibliothek Unterstützung für rund 200 Industrieroboter verschiedener Hersteller. Dank kontinuierlicher Weiterentwicklung deckt RoboDK heute mehr als 1.200 Modelle von über 80 Anbietern ab. Sowohl kleine Start-ups als auch internationale Konzerne setzen auf diese Lösung für komplexe Automatisierungsprojekte.
Die virtuelle Inbetriebnahme kombiniert mit Software wie RoboDK ermöglicht es, Roboteranwendungen noch vor der physischen Installation in einer digitalen Umgebung zu planen, zu simulieren und zu optimieren. Dadurch lassen sich Programmfehler, Kollisionen und ineffiziente Bewegungsabläufe frühzeitig erkennen und korrigieren, was umfangreiche Nacharbeiten verhindert. Gleichzeitig reduzieren sich Stillstandszeiten der Produktionslinien sowie Kosten für Personal und Material. Mit der kostenfreien Webversion können Einsteiger und Profis plattformunabhängig weltweit schnell erste einfache Automatisierungskonzepte realisieren.











